展示全部
近紅外DMD空間光調制器( 高損傷閾值NIR)
紫外高分辨率高速DMD空間光調制器(UV)
ViALUX計算成像用高速大數(shù)據吞吐量DMD空間光調制器
光纖耦合微透鏡陣列
定制微透鏡陣列
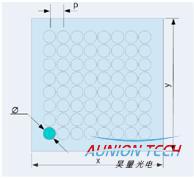
微透鏡陣列焦距檢測方法1解滓,千分尺測量法西安工業(yè)大學通過透鏡焦距和透鏡鏡面半徑的理論關系,利用顯微鏡測量微透鏡陣列子單元的直徑并用千分尺測量矢高筝家,從而完成焦距的測量洼裤,圖 1-1所示。圖1-1 平凸透鏡焦距示意圖對于一般的平凸型微透鏡陣列溪王,利用顯微鏡和千分尺分別測量子單元直徑 Ф和矢高 h腮鞍,計算其焦距為: (1-1)早期的微透鏡陣列制造常采用熔融光刻膠法制作,形成的是平凸面形的透鏡莹菱,利用該方法能完成相應的焦距測量移国。由于平凸透鏡焦距受凸面曲率半徑限制,使得該類型微透鏡陣列的應用受到較大的局限道伟。另外迹缀,該檢測方法采用千分表接觸是測量微透鏡陣列的矢高,易造成微透鏡表面的 ...
機前放置一個微透鏡陣列組成皱卓。光束經過每個微透鏡后都會聚焦在一點裹芝,聚焦點的位置被能夠反應出光束的方向,然后反推出光的波前信息娜汁。下面的內容是模擬光束經過透鏡后聚焦的過程,然后簡單的敘述了兩種相位恢復的算法兄朋。模擬步驟1. 構建相位面掐禁,獲取焦面上的圖像,計算斜率2. 重建波前方法分為兩種颅和,一種是區(qū)域法傅事,一種是模型法。3. 對比重構之后的相位和輸入的相位面峡扩,對比結果構建相位面蹭越,計算質心,獲取斜率1教届、構建相位面數(shù)字化處理的方式多是無量綱的數(shù)據响鹃,因此默認量綱為a驾霜,假設為1um。一個連續(xù)的光斑买置,光強和相位面是連續(xù)的粪糙,這里將它離散,變成一個二維矩陣忿项,單個像素的大小為a蓉冈。相位面經過微透鏡陣列后聚焦到CCD陣列所在 ...
有色彩濾鏡和微透鏡。該設計特意注明沒有色彩濾鏡轩触。也就是說寞酿,這種CMOS只能記錄光的明暗,不能記錄色彩脱柱。彩色CMOS 的原理也很簡單伐弹,直接在黑白圖像傳感器的基礎上增加色彩濾波陣列(CFA),從而實現(xiàn)從黑白到彩色的成像褐捻。很著名的一種設計就是Bayer CFA(拜耳色彩濾波陣列)掸茅。色彩濾波陣列是一種顏色濾波的綜合體,它可以去除光譜中的一些成分柠逞,使每個像素只保留一個顏色成分昧狮,用在數(shù)碼相機CCD傳感器之前。其中通過RGB三種顏色混合出真實色彩板壮,其中G占1/2逗鸣,R和B各占1/4,這是根據人眼對于顏色的感知原理設計的绰精。這樣一來撒璧,每個像素點只能包含RGB中的一個值,無法通過還原真實色彩笨使。缺失的另外兩個色彩需要 ...
前面添加一組微透鏡陣列卿樱。當光束經過微透鏡陣列后,每個微透鏡將光束聚焦為一個點硫椰。根據點的位移以及透鏡焦距計算得到光束的傳播方向繁调。哈特曼傳感器恢復相位的方法有兩種,一種是模型法靶草,常見的模型是澤爾尼克波前模型蹄胰,他是在一個圓圈內正交的。將每一項澤爾尼克系數(shù)的轉化到斜率后奕翔,與哈特曼的斜率擬合裕寨,從而得到各項澤爾尼克的系數(shù)。另一種是區(qū)域法,使用的模型有Fired(圖a)宾袜,Hudgin(圖b)和Southwell(圖c)三種模型捻艳,Southwell模型中,每個微透鏡假設為一個相位點试和,他與鄰近相位為點的關系為斜率與距離的乘積讯泣。區(qū)域法橫向剪切干涉儀相比于哈特曼,他將前面的微透鏡整列修改為0和pi的相位板阅悍『们回復的相 ...
過程中,使用微透鏡夾持器對快軸準直鏡(fast axis collimator节视,F(xiàn)AC)和慢軸準直鏡(slow axis collimator拳锚,SAC)進行夾持,整個夾持器安裝在高精度六軸調整架上寻行,可以進行x霍掺、y、z拌蜘、βx杆烁、βy、βz六個方向的運動調節(jié)简卧,因此夾持器的運動通過調整架的六軸運動來控制兔魂。由于FAC的后工作距離半導體激光器腔面很小,所以對FAC和SAC的裝調需要在相機監(jiān)控下進行精密操作举娩,需要相機實時顯示光斑形狀析校、光斑尺寸、發(fā)散角等以便于調節(jié)快慢軸準直鏡的位置铜涉。二智玻,快軸準直誤差分析在FAC的裝調過程中,如圖1-1所示芙代,除了位置誤差Δx對快軸準直沒有影響以外吊奢,其他的位置誤差Δy、Δz以及角 ...
將小孔替換成微透鏡聚焦纹烹,提高了光的利用效率事甜。2000年,四波橫向剪切干涉儀倍發(fā)明出來滔韵,它采用一個相位光柵,產生四個衍射光束掌实,他們之間相互干涉產生條紋后陪蜻,從干涉途中提取相位圖。相位光柵一個棋盤型的光柵贱鼻,光柵的相位分別是0和π宴卖,那么這個相位光柵可以簡寫成或者記作的卷積滋将,依據傅里葉變換和卷積的性質,只要分別求得兩項的傅里葉變換式症昏,然后相乘這一項仍舊是單縫衍射的因子這項是多峰干涉后的結果随闽,周期仍舊是u/2=(m+1/2) π以及v/2=(n+1/2)π并且兩項形成后得到如下結果,從下面圖中可以看出肝谭,主要是存在一級光掘宪,旁邊還存在一些光束通過上圖可以看到,其中仍舊含有一些G級次的光束攘烛,可以通過改變單個孔徑 ...
夏克-哈特曼微透鏡陣列掩膜法魏滚。2000年,Phasics改進了夏克-哈特曼技術坟漱,重新設計開發(fā)了帶有自己的掩膜鼠次,得到了Phasics 4波橫向剪切波前探測器。二芋齿、技術原理待測光進入到傳感器腥寇,經過衍射光柵分光,使±1級共4束衍射光通過觅捆,用CCD記錄干涉條紋赦役。采集到的干涉條紋,經過傅里葉變換惠拭,分別提取到強度圖和XY方向的相位梯度扩劝,并合成為相位圖。這樣通過一次采集职辅,就得到了該位置處的強度和相位信息棒呛,同時也能推算出其他位置處的強度和相位信息。一次拍攝域携,能同時解出強度和相位簇秒。三、優(yōu)勢1秀鞭、相比于夏克-哈特曼傳感器趋观,采樣點更多,具有更高的分辨率锋边。2皱坛、靈活易用,通過簡單的設置就能進行測量豆巨。3剩辟、消色差,一個傳感器 ...
果三維物體與微透鏡陣列之間的距離較長,則獲取的三維物體的圖像質量會明顯下降贩猎。盡管可以使用與光場相機的位置相對應的多個光線采樣平面來解決這個問題熊户,但是為了清晰地獲取三維對象的三維信息,需要在改變深度的同時多次采集圖像吭服。換言之嚷堡,使用光場技術無法一次清楚地獲取深度較深的三維對象的三維信息。由于有效獲取深度較深的三維信息需要花費大量時間艇棕,因此很難捕捉到人的運動等動態(tài)場景蝌戒。這是實現(xiàn)基于電子全息的下一代三維電視系統(tǒng)面臨的嚴峻問題。技術要點:基于此欠肾,日本千葉大學的Hidenari Yanagihara和Tomoyoshi Ito等人提出一種不采用光場技術的實時電子全息系統(tǒng)瓶颠,成功重建了一個人在現(xiàn)實世界空間中移 ...
iers)或微透鏡陣列,讓左右眼接收不同的視角刺桃,從而產生立體視覺效果粹淋。但是這種技術需要觀察者站在一個特定的位置,這限制了它的使用瑟慈。當然桃移,通過自動人眼追蹤技術可以緩解對觀察者位置的限制要求,但是這種技術還沒有普及開來葛碧。3)運動視差(Motion Parallax)運動視差需要投影許多個視圖借杰,這樣,即使觀察者在顯示器前移動也能夠看到正確的視差(parallax)进泼。不同視角的被投影密度需要確保能夠產生正確的立體信息蔗衡,因此,每個瞳孔間距至少需要兩個視角乳绕。然而绞惦,為了實現(xiàn)從一個視角到另一個視角的平滑過渡,需要更大的視角密度洋措。z佳視角密度取決于顯示器的確切配置和預期的觀察者距離济蝉,但數(shù)量大約為每度一個視角的量 ...
的 LFM,微透鏡陣列 (MLA) 放置在寬視場顯微鏡的原生像平面 (native image plane, NIP) 上菠发,并且光學信號以欠采樣方式記錄在 MLA 后焦平面上王滤。波動光學模型的發(fā)展,使得嚴重欠采樣的高頻空間信息可以通過對點擴散函數(shù)(PSF)求解卷積的方法得到一定程度的恢復滓鸠,從而放寬空間和角度信息之間的權衡要求雁乡。當前不足:當前有兩個主要因素限制了 LFM 的更廣泛應用。首先糜俗,LFM 的空間信息的采樣模式是不均勻的蔗怠。特別是在NIP附近墩弯,信息的冗余導致重建時產生嚴重的偽影。其次寞射,體積重建采用波動光學模型的 PSF 解卷積。傳統(tǒng) LFM 的 PSF 在橫向和軸向維度上都有空間變化锌钮,因此用 ...
或 投遞簡歷至: hr@auniontech.com